

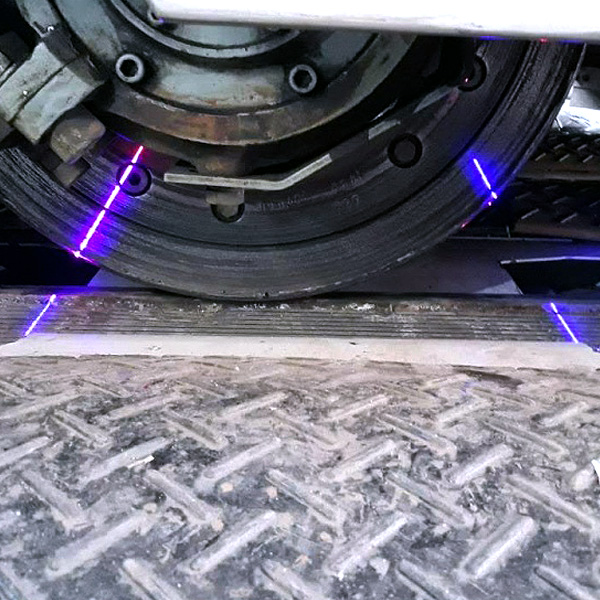

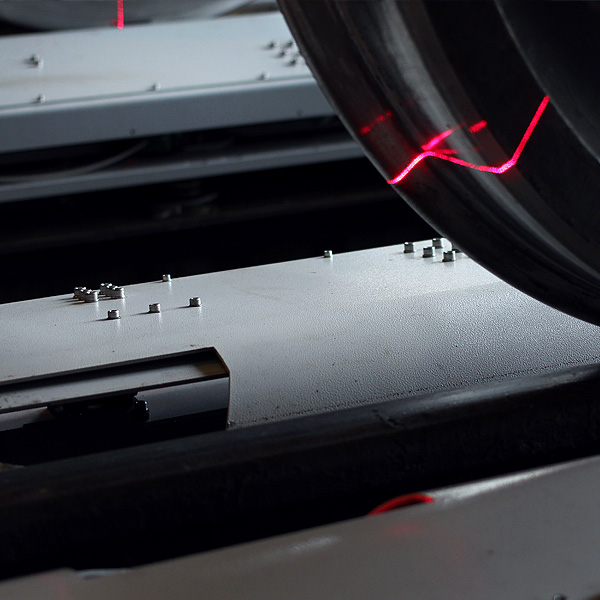
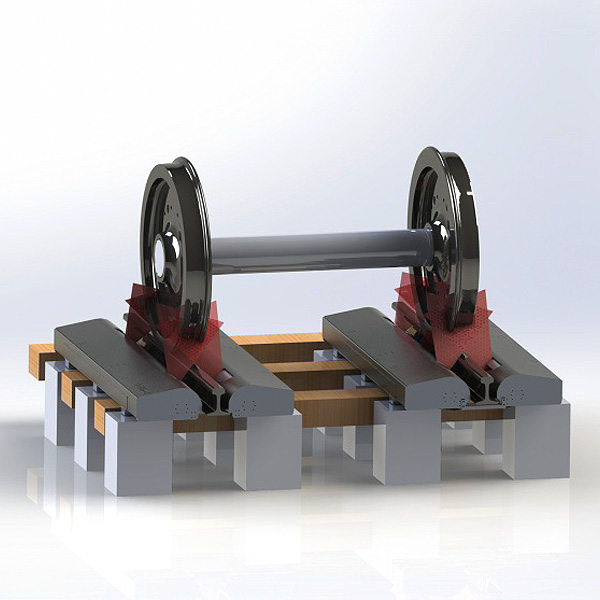



Система предназначена для бесконтактного автоматического измерения геометрических параметров колесных пар железнодорожного подвижного состава (локомотивов, вагонов, метро, трамваев) в реальном времени и использует комбинацию 2D лазерных сканеров, установленных по обе стороны рельса.
Система легко устанавливается на любом типе рельсовой инфраструктуры.
 |
ПАНОПТАСистема контроля колесных пар на ходу
|
| Измеряемые параметры: |
|
| Система контроля колесных пар на ходу Panopta. Руководство по эксплуатации, 6 МБ Посмотреть спецификацию → |
Система контроля колесных пар на ходу. Спецификация
| Параметр | Значение |
| Диапазон измерений | |
| Высота гребня, мм | 20…45 |
| Толщина гребня, мм | 20…50 |
| Крутизна гребня, мм | 1…15 |
| Толщина бандажа, мм | 30…100 |
| Ширина бандажа, мм | до 145 |
| Диаметр, мм | 400…1400 |
| Межбандажное расстояние, мм | в соответствии с шириной колеи |
| Погрешность измерений | |||
| Измеряемые параметры | Максимальная погрешность измерения при скорости поезда до 10 км/ч |
Максимальная погрешность измерения при скорости поезда до 60 км/ч |
Максимальная погрешность измерения при скорости поезда до 120 км/ч |
| Высота гребня, мм | ± 0,2 | ± 0,4 | ± 0,6 |
| Толщина гребня, мм | ± 0,2 | ± 0,4 | ± 0,6 |
| Крутизна гребня, мм | ± 0,2 | ± 0,4 | ± 0,6 |
| Толщина бандажа, мм | ± 0,5 | ± 0,5 | ± 1,0 |
| Ширина бандажа, мм | ± 0,3 | ± 0,5 | ± 1,0 |
| Диаметр колеса, мм | ± 0,5 | ± 0,5 | ± 1,0 |
| Межбандажное расстояние, мм | ± 0,3 | ± 0,5 | ± 1,0 |
Максимальная скорость поезда, Panopta.60 — 60 км/ч
Максимальная скорость поезда, Panopta.120 — 120 км/ч
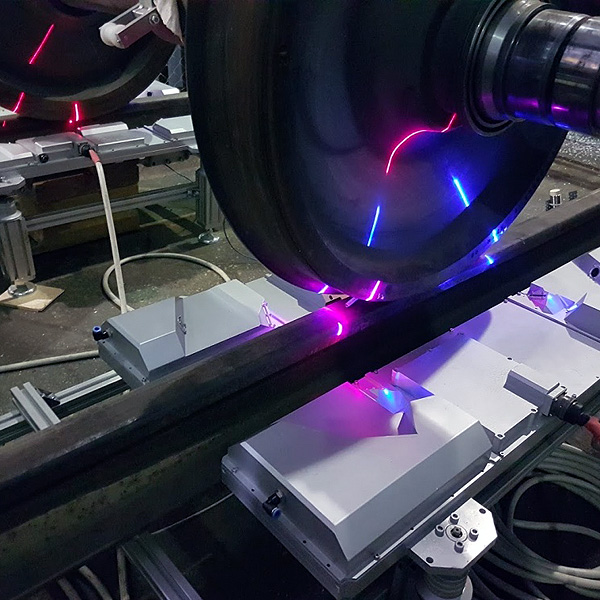
Система предназначена для бесконтактного автоматического измерения геометрических параметров колесных пар железнодорожного подвижного состава (локомотивов, вагонов, метро, трамваев) и использует комбинацию 2D лазерных сканеров (5 или 7 шт.), установленных по обе стороны рельса и откалиброванных в одну общую систему координат.
Цикл измерения начинается, когда индуктивный датчик обнаруживает колесо.
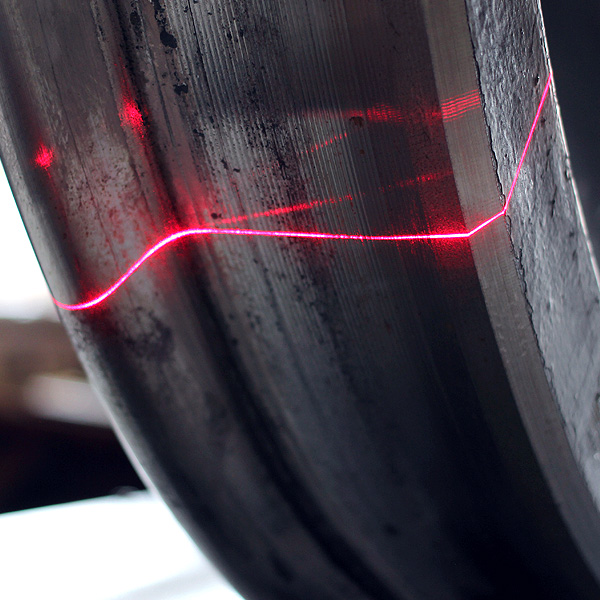
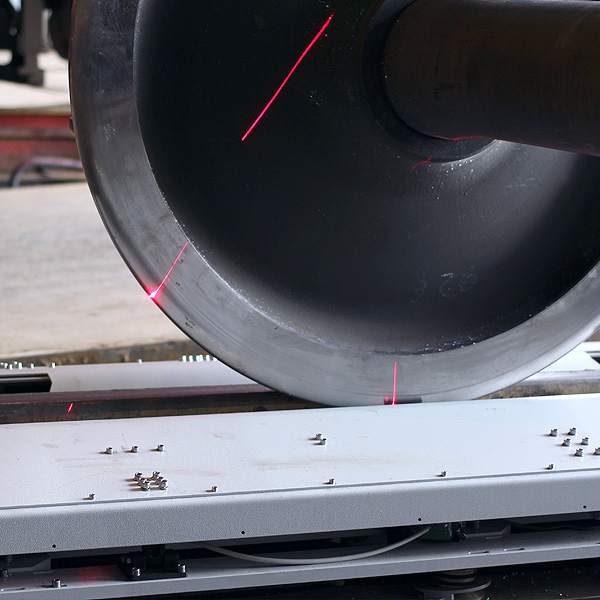
Профили колес снимаются в момент прохождения их через зону сканирования.
Результаты измерений посылаются через Ethernet на управляющий компьютер для построения профилей колес и расчета размеров и сохраняются в базе данных управляющего компьютера.
Система контроля колесных пар на ходу
Система распознавания номеров